- I have a Bachelors degree in Computer science and Cognitive neuroscience (Rutgers University and Columbia Engineering class of 2024). I was awarded the JFK Memorial Merit Scholarship, Dennis Michael Walker Academic Award, and Computer Science Departmental Award.
- Throughout college I worked on robotics research and was fortunate to be mentored by Kostas Bekris and Shuran Song.
- I left my role at Pocket in May to work on neural network interpretability, currently working on model diffing and crosscoders.
- I strongly believe there is only one way to be interesting: be vulnerable in pursuit of your answers to the world. Become your curiosity and zest for life. I try to live by this.
Updates
- Oct 2024 Cofounded Pocket backed by Jeff Dean
- June 2024 Accepted as an entrepreneur in residence at EF's S24 new grad cohort
- Sep 2023 Worked on 3D mesh generation from text at PracSys mentored by Shiyang Lu and Kostas Bekris
- June 2023 Worked on tactile sensing for robotics at CAIR under Jingxi Xu for a summer
- Jan 2022 Spent a year as a transfer student at Columbia University's School of Engineering in Manhattan
- June 2021 Moved to San Francisco to live at 2 tech co-living houses. Worked on Qiskit and EVM projects
Research
 Revolving-View 3D Object Completion Using Text-Conditioned Inpainting
Revolving-View 3D Object Completion Using Text-Conditioned Inpainting
Tasha Pais, Shiyang Lu, Kostas Bekris
December 2023
Github
Tasha Pais*, Nikhilesh Belulkar*, Jingxi Xu, Shuran Song
July 2023
Github
Tasha Pais*, Nikhilesh Belulkar*, Huy Ha, Shuran Song
December 2022
PDF • Github
* indicates equal contribution, active exploration video by REAL
Projects
Assorted
last call for all builders and future builders! pic.twitter.com/B0CtO2MFNL
— The Residency (@_TheResidency) November 13, 2024
I was part of The Residency's chapter 4 and 5-- a startup house backed by Sam Altman. It was one of the most productive and fulfilling times in my life. Here's a video we shot with other residents in our house with me as the voiceover.
November 2024
Website • Tweet • Hardware pics
Computational Robotics
 Implementations of Particle Filter, Kalman Filter, and Extended Kalman Filter for Localization
Implementations of Particle Filter, Kalman Filter, and Extended Kalman Filter for Localization
The project delves into sensor technologies for robotics, emphasizing localization and Bayesian reasoning for accurate
robot positioning. It explores Bayesian filtering techniques, applying them to occupancy grids for spatial representation
and navigation. The study further investigates particle filters and Kalman filters for dynamic system state estimation and
noise filtering.
December 2023
Report • Github
 Computational Strategies in Robotic Motion Planning: PRM, PRM*, RRT, RRT*
Computational Strategies in Robotic Motion Planning: PRM, PRM*, RRT, RRT*
The project starts by implementing probabilistic roadmaps (PRM) and rapidly-exploring random trees (RRT).
It advances into asymptotically optimal sampling-based planners, integrating potential
functions for improved path efficiency. Additionally, it encompasses the challenges posed by non-holonomic and under-actuated systems,
to build a steerable kinematic model.
November 2023
Report • Github
 Collision-Free Navigation up to 6 dimensions R3 x SO(3)
Collision-Free Navigation up to 6 dimensions R3 x SO(3)
The project encapsulates the study and application of robotic path planning techniques, exploring grid-based search algorithms,
visibility graphs assessment, and combinatorial planning. It delves into spatial analysis through trapezoidal decomposition and
C-space introduction, abstracts these configuration spaces to simplify complex planning scenarios, and applies the foundational
concepts of sampling-based motion planning strategies.
October 2023
Report • Github
Machine Learning
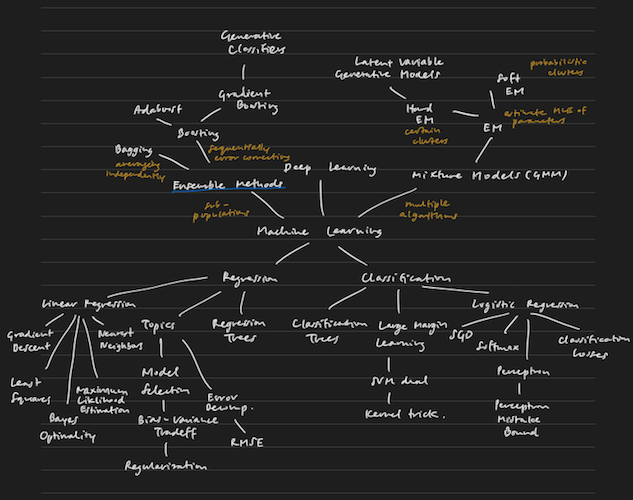
Proofs • Colab
Softmax over negative margins of the ensemble to derive adaboost
Proofs • Colab
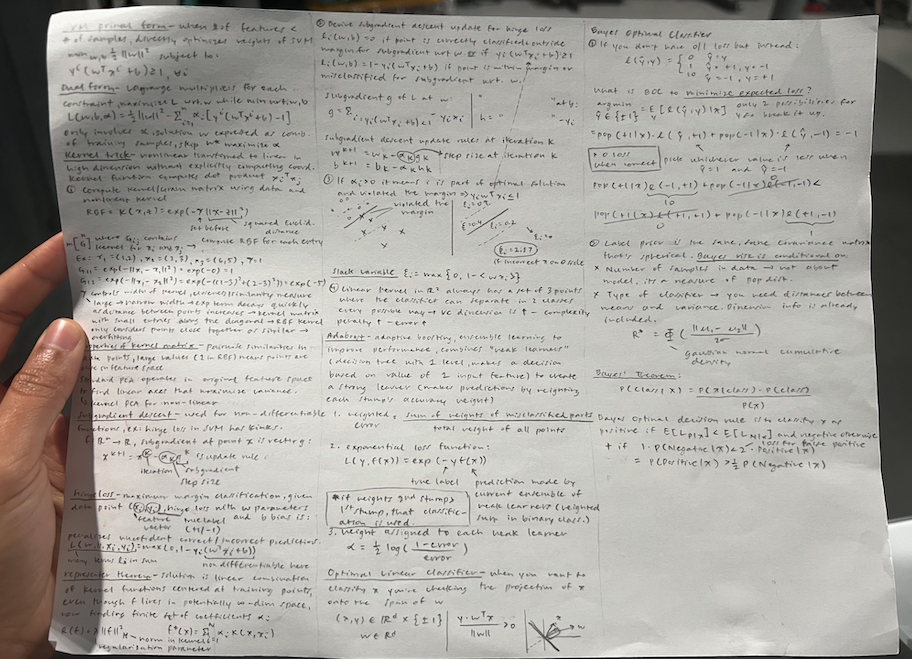
SVM in dual and primal, kernel trick, stochastic subgradient descent pegasos
Proofs • Colab • Handwritten notes
l2 regularization, cross entropy loss, Large margin learning, representer theorem
Proofs • Colab
Least squares estimation, maximum likelihood, asymmetric squared loss
Proofs • Colab
Sep-Dec 2023
Jacobian Chain Rule and Linear Algebra Refresher •
Everything I Know Written As Tiny As Possible
* all projects were implemented on datasets like MNIST, CIFAR10, California housing, etc.
{kind=link}
Blockchain
I built a Tile Stacking Game leveraging Three.js for its 3D graphics, making the gameplay visually engaging. On the frontend, I wrote the game logic in JavaScript, ensuring a smooth user experience. For the backend, I chose Node.js and Express.js to handle server-side operations and API requests. To integrate blockchain functionalities, especially for minting high scores as NFTs, I employed Solana's web3.js library and connected to the Phantom Wallet.
May 2022
Github • Link to play
Quadratic voting application deployed on polygon, developed in Hardhat and Next.js, smart contract tests written in solidity and javascript, inspired by Vitalik's blog post advocating for nonlinear cost functions
December 2022
Github • Deployed link
Operating Systems
 Architecting Advanced Memory Management: From Custom Malloc to Multilevel Page Tables and TLB Caching
Architecting Advanced Memory Management: From Custom Malloc to Multilevel Page Tables and TLB Caching
Custom malloc for virtual address allocation; two-level page table for 32-bit address translation; direct-mapped TLB for efficient address translation caching; bit manipulation for efficient memory tracking; designed a 4-level page table for 64-bit addressing; ensured thread safety and compatibility with various page sizes, benchmarked using matrix multiplication.
November 2023
Report • Github
 Designing Concurrency: Advanced Thread Management and Scheduling Techniques
Designing Concurrency: Advanced Thread Management and Scheduling Techniques
Thread creation, yielding, exiting, joining, and synchronization using mutexes; scheduling policies including Pre-emptive Shortest Job First (PSJF) and Multi-Level Feedback Queue (MLFQ); thread context management through makecontext, swapcontext, and ucontext APIs
October 2023
Report • Github
Systems Programming
 Design and Implementation of a Multiplayer Tic-Tac-Toe Game Service
Design and Implementation of a Multiplayer Tic-Tac-Toe Game Service
Advanced socket programming, multitasking (or select() for I/O multiplexing), and thread synchronization for secure,
simultaneous game state management. Extended functionality includes interruption handling via signals, specifically
using pthread_kill() to signal threads and pthread_sigmask() for signal reception control, leveraging SIGUSR1 and SIGUSR2
for managing blocked system calls.
April 2023
Github
 Recreating a Command-Line Shell
Recreating a Command-Line Shell
I designed and implemented a command-line shell akin to bash or zsh. I utilized Posix stream I/O for unbuffered input and output operations, manipulated the working directory, and spawned child processes to execute user commands while capturing their exit statuses. My implementation leveraged dup2() and pipe() for redirecting standard input and output, enabling the construction of pipelines between commands.
March 2023
Github
Computer Architecture
 Crafting a Cache Simulator: Direct-mapped, N-way and Fully Associative
Crafting a Cache Simulator: Direct-mapped, N-way and Fully Associative
This simulator dealt with simulating memory operations like reading and writing individual bytes, employing different cache mapping strategies, and implementing replacement policies. Specifically, it simulated write-through, write-allocate cache behavior, and introduced prefetching to improve spatial locality benefits.
December 2021
Github
 Truth Table Generator for Digital Circuits in C
Truth Table Generator for Digital Circuits in C
This program interprets a custom specification language describing circuits' inputs, outputs, and the logical gates connecting them. By efficiently parsing these descriptions, "truthtable" computes and prints all possible input combinations alongside their corresponding outputs, offering insights into the digital logic underlying the specified circuitry.
November 2021
Github
 Machine Learning: One-Shot Learning for Home Price Prediction in C
Machine Learning: One-Shot Learning for Home Price Prediction in C
Programming in C, Unix environment, File I/O, dynamic memory allocation, machine-learning algorithm implementation, Gauss-Jordan elimination, matrix handling, "one-shot" learning algorithm application, weight calculation from attributes, matrices for attribute and price representation, matrix transformation and inversion.
October 2021
Github
Consulting
 Building low-cost, cloud computing institutes in Dharavi, Mumbai in Partnership with UN SDG 12
Building low-cost, cloud computing institutes in Dharavi, Mumbai in Partnership with UN SDG 12
In partnership with the UN, presented at 2021 general assembly; building low-cost, cloud computing institutes in Dharavi, Mumbai; refer to slides 28 and 29 for break-even calculations with net output and capital cushions
May 2021
Deck
Art